*この記事は NoCamels.com の記事を日本語に翻訳して作成しています。
MedRobotics – Flex Robotic System
NYU Langone Health の医師たちは、2018年の9月前半に、従来の内視鏡では切除できない病変を手術を行うことなく取り除くことが出来るロボットの内視鏡を使用した。胃腸科医の Gross医師は、胃腸管の治療にFlex Robotic Systemを使用している。このシステムは、Technionのイスラエル工科大学工学部のアロンウルフ博士によって作成されたヘビ型ロボット装置を土台としている。この装置によって外科医は、解剖学的に届きづらいところのアプローチと視野確保が可能なる。
Human Xtensions – HandX Operating Platform
Netanyaを拠点とするHuman Xtensionsは、外科医が腹腔内の深い位置で複雑な操作をすることを可能にする画期的な技術を提供している。Buffalo General Medical Center の医師たちは、逆流を防ぐため食道と胃に対する複雑なヘルニアの手術と処置の際に使用している。この技術は、手持ちサイズの機器で、外科医の元々の手の動きを患者の体内での複雑な動きへと変換するもので、2018年3月にFDA承認を受けた。同社の最終目標は、手術ロボットの力と複雑な動きを可能にするこの機器の融合である。
Microbot Medical – SCS Device
Microbot Medical は、埋め込み型の医療機器を洗浄する小型ロボットを売りにしている。これは、血管や消化管、呼吸器などのヒトの体内の様々な空間を移動して進むことができる自律型マイクロデバイスである。その独特の構造によって、狭い空間や曲がった通路を進むことができ、また体内に長くいることができる。同社はまた、水頭症の治療のための自浄式シャントと、大腸内視鏡手術に使用するための自走式の使い捨て内視鏡を開発中だ。
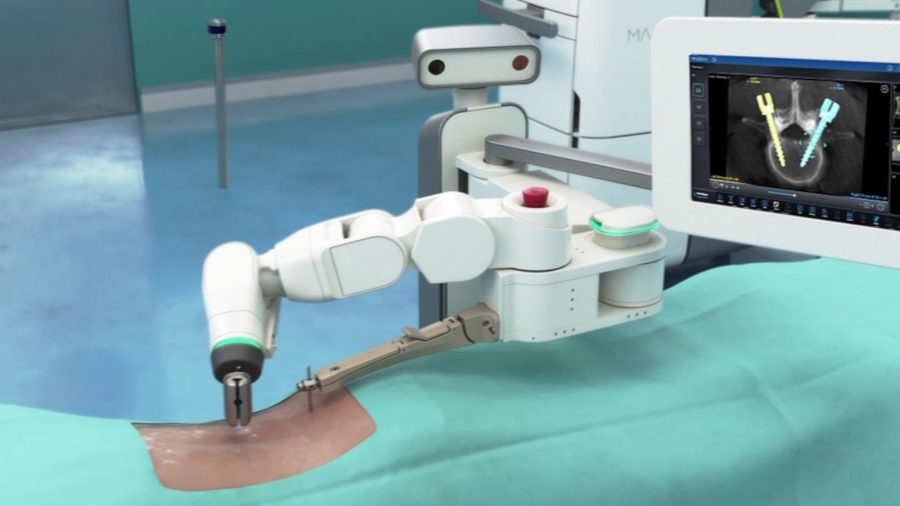
XACT Robotics – needle steering and insertion system
XACT Roboticsは、生検や切除などの低侵襲的介入手技における針操作のためのロボット技術プラットフォームを開発し、体内で医療機器を操作する。このロボット技術の第1世代は、肺のCTガイド下 *インターベンショナルラジオロジー(IVR)であった。この技術により、医師は制御室のXACTワークステーションで処置を計画し、そこからドレナージ、注射、組織の焼灼のために針を配置する正確なポイントを計算することができる。 また、針を再挿入する必要なしに計画された経路に沿ったあらゆる変化を検出しそして修正することができる。
*IVR : 画像ガイド下で行う治療の総称。
XACT Medical – Fast Intelligent Needle Delivery (FIND)
XACT Medical (XACT Roboticsとは別) は、Fast Intelligent Needle Delivery(FIND)ロボットとして知られる革新的な画像誘導ロボットニードルステアリングシステムを開発している。Cincinnati Children’s Hospital Medical Center と Ben Gurion Universityが共同で設立したXACT Medicalは、そのFINDシステムが、最初の試みでの医師の血管アクセスを向上させると述べている。XACT Medicalは現在、小児および成人集団の中央群に焦点を当てている。 Guterman教授は、同社はFDAの認可取得に向けて取り組んでいるため、動物実験を開始することを望んでいると語った。
*NoCamels.com の原文を読む。